


304am永利集团(中国)-Medtec China技术发展及应用综述:计算机辅助骨科手术机器人
2026-05-21 19:15:01
按照2022年6月发布的一份市场陈诉,脊柱手术呆板人市场到2022年价值为3.312亿美元,估计到2028年将到达9.888亿美元。
2. 陈诉称,北美以68% 的比例盘踞了呆板人脊柱市场的最年夜份额。亚太地域紧随其后,市场份额约为18%。
3. 陈诉称,呆板人脊柱医疗技能行业的重要介入者包括 Mazor Robotics、Globus Medical、Medtech SA 及 Tinavi Medical Technologies(指中国的天智航)。
Medtec China 相识到因为计较机、导航及呆板人技能的立异,计较机辅助呆板人体系已经被用在各类骨科手术,包括枢纽关头成形术、脊柱手术、骨肿瘤手术、枢纽关头镜查抄、骨折复位、创伤手术的骨折固定。以骨折手术为例,于微创骨折复位历程中,外科大夫需要于术中透视的连续监测下手动操作骨折的骨头。受限在C型臂的视线,骨折复位的效果重要取决在外科大夫的技能及经验。骨折部位的不准确定位及对于齐以和扭转不良经常致使术后并发症,例如畸形愈合及骨不连。连续辐射是今朝骨科创伤手术的一个条件前提,但对于医务职员会孕育发生累计危险。今朝重要面对的挑战包括:1)骨折的不成见性及繁杂性;2)骨折复位精度更高,术后功效更佳;3)适量的呆板人自由度(DOF)提供充足的事情空间;4)下肢骨折复位时需要充足的呆板人输着力。为了实现提高精度、输着力及扩大事情空间的目的,各类类型的呆板人于已往几十年中获得了成长,包括串行、并行及混淆呆板人机构。对于在骨折手术,另外一个问题是骨折的不成见性。是以,呆板人于手术历程中需要知道或者“看到”骨折的位置,而这于传统手术中必需经由过程X射线来实现。计较机辅助导航体系可用作手术呆板人的“眼睛”。于“导航体系”部门先容了用作手术骨折复位的自力体系。于“呆板人体系”部门,先容了当前差别类型的呆板人,包括:1)串行呆板人机构,如单侧外固定器、牵引装配及串行机械臂;2)并联呆板人机构,如环形外固定架、牵引装配、并联呆板人机械手;3)混淆呆板人。于“结论”部门,总结了将来骨科手术成长标的目的及潜于运用。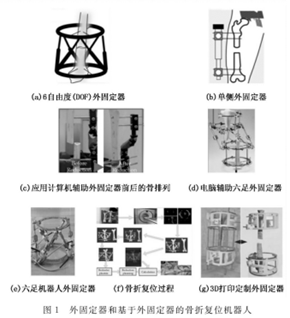
1 海内外研究近况
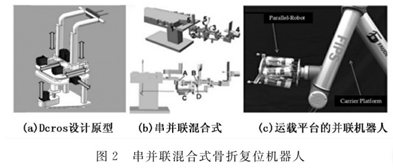
骨科呆板人骨外起步较早,美国、德国、日本都有比力成熟的产物。此中基在外部固定框架布局的复位呆板人尤为典型,具备两个重要布局,一个是图1(a)中的六自由度(DOF)外固定器,另外一个是图1(b)中的单侧固定器。已经进入临床运用基在外部固定框架布局的复位呆板人如图1所示。而最为典型的运用是基在串并联混淆布局的骨折复位呆板人,还有没有成熟的样机及贸易化运用,如图2所示。春江水暖鸭先知,很多专注在医疗呆板人等医械产物设计研发的企业也纷纷入驻Medtec China 2023展会现场,包括迈患上Maider,米克朗,赛能,IMA spa,欧赛斯,艾利特等,点击快速预挂号,来现场看火热与前沿展品。
2 呆板人体系
2.1 人机协同体系
骨折复位人机协同体系设计是保障病人安全及提妙手术质量的一个繁杂而要害的历程。临床实践注解,设计不妥的装备会致使过错及相干变乱。为此安全性设计是首要的,文献[10]指出骨碎片之间的安全间隔:过分的牵引可能会毁伤坐骨神经。虽然需要四肢的牵引运动,但必需于安全规模内。骨科大夫保举的牵引间隔安全规模于近端及远端骨碎片之间为25~30 妹妹。只管一些医疗装备制造商已经经于其产物中纳入了人的因素原则,但于这类介入的现实性方面仍旧缺少响应的事情。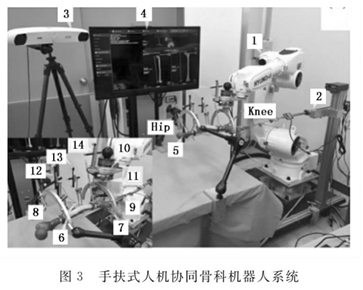
2.2 骨科生物力学机制与模子仿真研究近况
生物力学机制与模子研究用在骨科练习及手术预演,引导骨科手术呆板人的节制计谋及设计参数要求。有两种生物力学建模要领:质量弹簧法(如图4所示)及有限元法。今朝已经经有许多乐成的研究事情,如使用有限元法研究腰椎、足部、手臂等的生物力学特征,但将研究重点放于腿部,特别引导骨折复位的骨科手术方面,很少有现实的模子。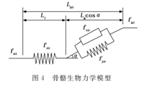
2.3 呆板人节制与交互技能
骨折复位手术呆板人的重要长处是经由过程遥控及主动节制有用地削减了辐射。差别节制技能的对于比表还有没有临床数据,没法给出正确的数据规模。可是,按照节制要领自己的道理揣度出相互之间的机能差异。若您想相识更多有关人工枢纽关头等骨科相干的热门话题,插手Medtec China 202316年夜特点展区“第八届植入参与医疗器械中国峰会”,来自北京年夜学等高校的佳宾将解说金属植参与器械产物中的医工联合。议题笼罩金属骨科植入物的质料选择、产物设计与生物学评价、金属血汗管参与器械的质料选择、产物设计与生物学评价等。
2.4 “骨一呆板人”毗连技能
因为呆板人骨折复位手术是一种微创手术,骨 呆板人毗连不克不及由年夜型接触东西(如年夜型咬骨钳)完成。然而,抛却年夜面积的接触可能会降低毗连的强度,即怎样彻底夹紧骨头来完成复位仍旧是一个难题』…。经常使用的骨 呆板人毗连要领有:1)外固定销或者螺钉毗连(如图5所示);2)经由过程脚靴的毗连。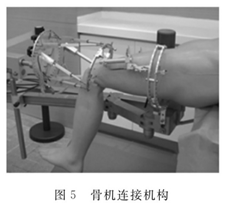
3 导航体系
手术导航是一种颠末计较机图象处置惩罚的可视化体系,可提供有关手术器械及植入物和其对于方针器官的标的目的的主要临床信息。此类体系凡是使用3D位置传感器举行空间定向。为了实现切确复位,还有需要举行图象配准,今朝的配准计谋重要有两种:一种是基在剖解统计的配准计谋;另外一种是基在对于侧骨图象的配准计谋”1…。于这两种要领中,以统计数据库中的骨模子数据或者对于偏重建模子数据的镜像图象作为复位准则,使用CT扫描获得的骨折近端及远端图象求解复位变换矩阵。4 竣事语
计较机辅助骨科呆板人体系的重要利益是经由过程提妙手术步伐的切确性,从放射图象中消弭异样值,如微创手术,并可以使用计较机辅助骨科呆板人体系对于新大夫举行教诲及培训。术前规划可以举行手术模仿,从而优化手术规划。经由过程利用基在体积的导航可以削减术中辐射袒露,而且经由过程利用呆板人铣削可以显著削减术中肺栓塞的体积。手术需要分外的操作来放置及植入标志,这会致使手术时间的延伸,同时也会增长掉血量。于这类环境下,因为削减了辐射剂量及手术时间,透视导航是适合的。经由过程整合新的要领、仪器、图象混淆及可视化可能性,计较机辅助骨科呆板人技能于削减侵入性方面具备强盛的将来潜力。将来,骨科手术呆板人将朝着低辐射、微创、操作简朴、顺应性强的标的目的成长。为包管手术的正确性,今朝计较机辅助骨科呆板人体系中的年夜部门成像及导航体系都是基在术前或者术中CT数据及人工影像支解重修。医务职员及患者的累积辐射剂量仍旧是一个年夜问题。跟着人工智能的快速成长以和基在年夜数据的呆板进修及深度进修对于医学图象的主动处置惩罚,估计将实现计较机辅助骨科呆板人体系的。文章来历:中北二院研究生事情 参展商咨询: Linc Cai 蔡锋 德律风:+86 21 6157 7217 邮箱:[email protected] 钻研会咨询: Rebecca Lv 德律风:+86-21 6157 7279 邮箱: [email protected] 观光咨询: Tracy Zhang 张昕 德律风:+86 10 6562 3307 邮箱: [email protected] 媒体和投稿接洽: Tracy Zhang 张昕 德律风:+86 10 6562 3307 邮箱:[email protected] -304am永利集团(中国)