


304am永利集团(中国)-有源医疗设备展深度解析 | 手术机器人行业技术和专利分析报告
有源医疗装备展指出,外科手术呆板人是一种正于重塑医学实践的厘革性技能,并且立异的程序还有于不停加速。虽然外科大夫仍旧节制着手术历程,但他们从这类辅助中受益不浅。只管近来外科手术呆板人得到了相称多的存眷,但它们现实上已经经被病院利用了近20年,而且已经经展示了有益的成果。估计于将来五年内,因为熟悉到这些呆板人的上风、全世界老龄化人口的医疗需求以和需要使用有限数目外科大夫技术的需求,它们的部署及专用体系的推出将年夜幅增长。
于这一范畴内的常识产权空间很是重大且繁杂,包罗跨越20,000项直接与外科手术呆板人相干的专利。假如再加之来自相干范畴(如外科导航、图象处置惩罚和术前计划软件)的专利,这个数字会更年夜。为了理解常识产权的空间,主要的是要相识差别介入者进入市场的时间和其存眷点、呆板人针对于差别医疗步伐的专业化水平,以和塑造这一繁杂范畴的立异海潮。
主要介入者及趋向
有源医疗装备展认为,深切研究常识产权需要洞察那些区别各介入者的使能技能及产物特征,以和鞭策下一波立异的要害趋向。配景信息以下图所示。需要留意的是,于美国,外科手术呆板人要进入手术室必需得到美国食物药品监视治理局(FDA)的核准,而美国今朝是最年夜的市场。FDA的核准包括特定手术体系最早获批的时间线,以和所涵盖的手术运用详情。这些公司凡是还有会采用严谨的常识产权创造计谋。
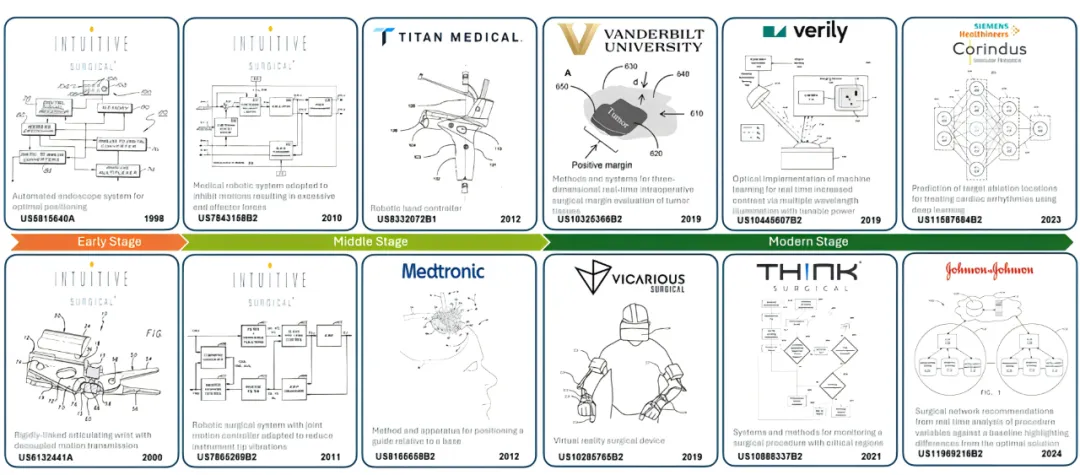
下图凸起了这一范畴的几个主要方面。直觉外科公司(Intuitive Surgical)于已往的二十多年里一直主导着这个行业,此中一个初期体系于2000年得到了FDA的利用许可。直觉外科的主导职位地方获得了初期专利的撑持,这些专利笼罩了技能的要害方面。到2020年,它的初期专利最先到期,这为很多新进者创造了时机,为了应答行将到来的竞争,直觉外科创立了一个多样化的常识产权组合,截至2023年末,该组合包罗了跨越3,000项美国专利及待审申请,以和全世界规模内跨越14,000份文件。
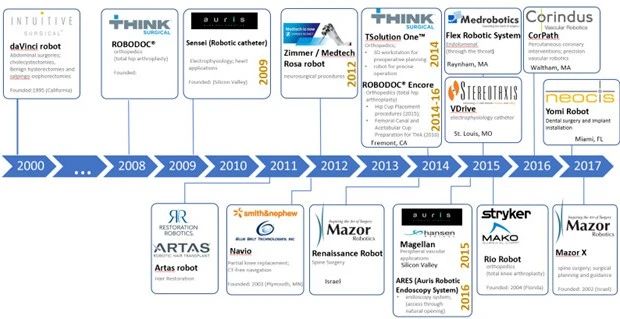
其他初期的介入者还有包括:
Zi妹妹er/Medtech 的 Rosa Robot:Rosa 是一种重要用在神经外科手术的呆板人平台,它也能够用在正骨外科。
Stryker/Mako 的 Rio Robot:Rio 是一个模块化的手术平台,重要用在撑持枢纽关头置换手术。
Mazor 的 Mazor X:这是一种集成的手术平台,用在脊柱手术,提供术前计划及术中履行撑持。
强生(Johnson Johnson)/Auris 的 Monarch 平台:Monarch 是一个内窥镜体系,用在诊断及医治肺部疾病。
有源医疗装备展Medtec现场将设四年夜专区,席卷电子光学、AI、IVD诊断和影像、检测、临床、法例、研发设计 年夜动物试验专区等展品,点击此处报名参展
从2018年至2024年间FDA核准的手术呆板人的密集时间线上,可以看脱手术呆板人技能的快速成长及远景(拜见下图)。
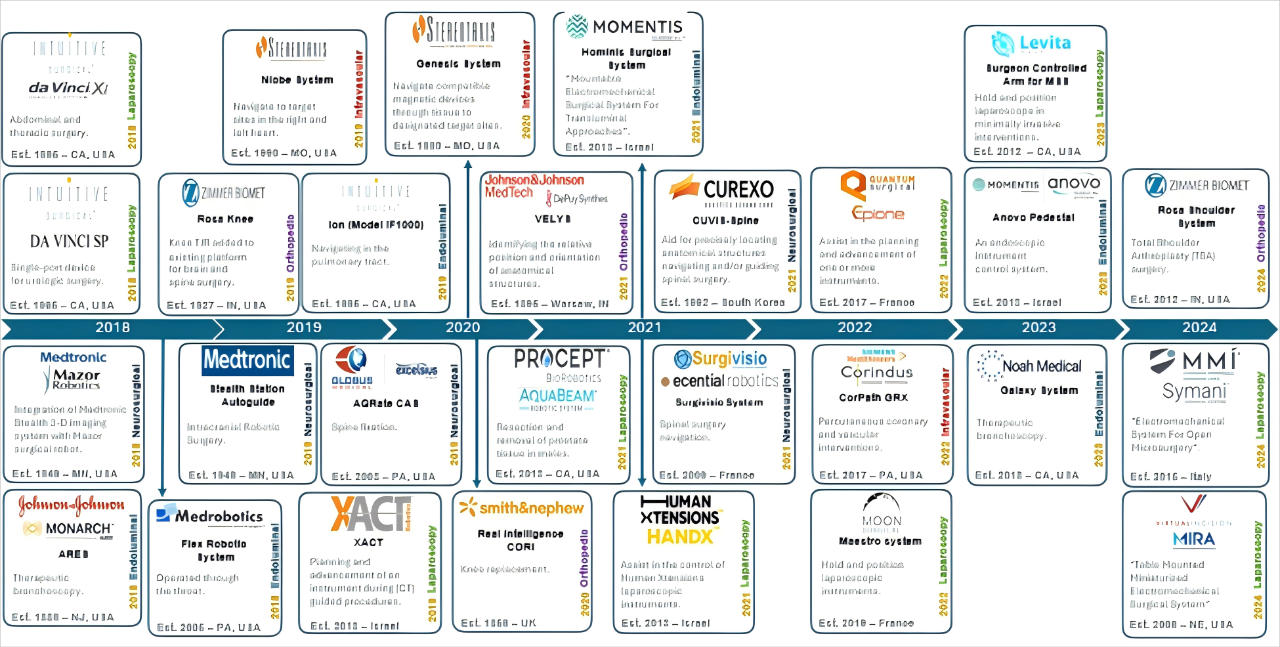
专用手术呆板人的激增反应了多种因素鞭策了立异的加快成长。这些因素包括:电子元件的小型化,于该范畴初期专利的到期,相干的前进(例如,手术前规划软件),使用年夜数据及其他使能技能来实现更优的成果。此外,巨年夜的市场潜力吸引了多样化的介入者。直不雅外科公司(Intuitive Surgical)的达芬奇体系于腹腔镜手术(如妇科及前列腺手术)方面的乐成,引发了针对于其他手术步伐的立异,并规避了直不雅外科的专利及产物主导职位地方。这一计谋已经经成为近来获批的多个专用手术呆板人乐成的法门。
手术呆板人精度的蜕变
手术呆板人的运用始在创立优化精度的体系;使外科大夫可以或许以更高的精度及灵巧性举行手术,消弭任何颤动,并提供触觉反馈来指导外科大夫。
有源医疗装备展指出,多年来,手术呆板人还有经由过程使用数据实现了更高的体系精度。网络的数据使到手术前规划越发完美,并于手术历程中做出更为明智的决议计划,从而改善总体成果。一项要害的使能技能是及时数据,它经由过程让外科大夫鉴别其探针接触的构造是否为癌性以和癌性构造的水平,从而转变了手术实践。及时数据的获取使患上外科大夫可以或许于最小化对于临近细胞毁伤的同时正确地切除了癌性肿瘤。
与精度蜕变相干的立异节拍于下图中有所表现,下图展示了从2000年到2023年提交的一些要害技能专利,技能立异有三个较着的阶段。
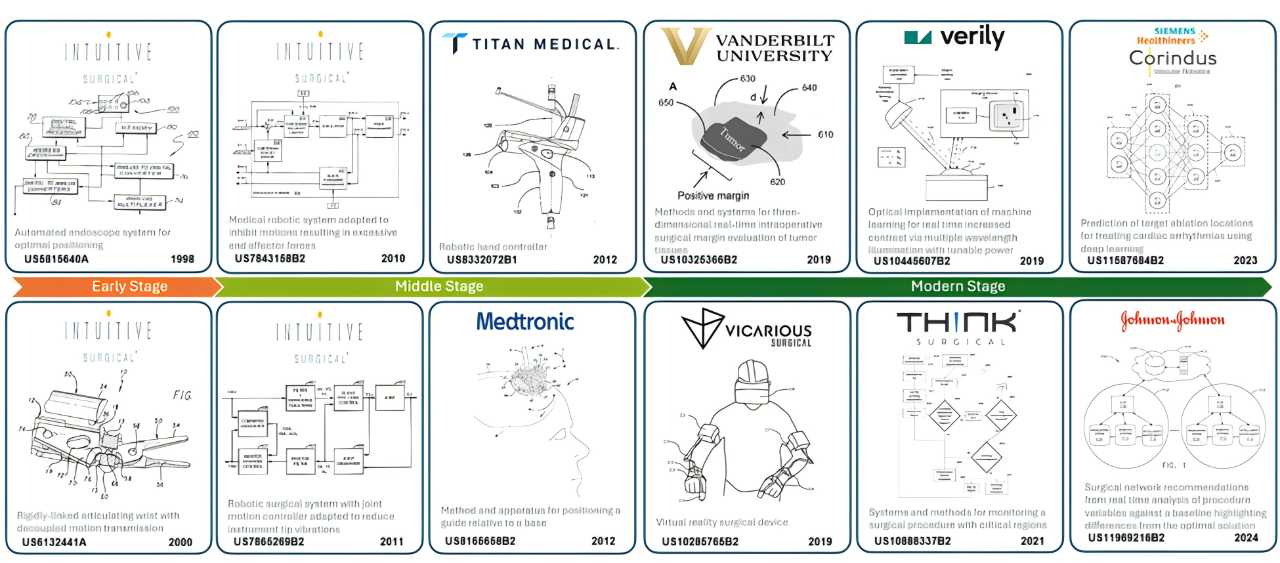
初期阶段(1997年至2002年)这个阶段确保了呆板人或者装备可以或许实现要害的手术需求,包括导航(将呆板人指导至所需的目的地)。
带有屏幕、两个把手及一个脚踏板的用户界面(Computer Motion/Intuitive Surgical, US6244809B1, 2001)。
将用户号令转化为器械动作(Computer Motion/Intuitive Surgical, US5815640A, 1998)。
杆及齿条体系,将杆的线性运动转换为夹爪的扭转运动(Computer Motion/Intuitive Surgical, US6132441A, 2000)。
中期阶段(2007年至2012年)这个阶段创造了一个节制程度及手术现场的意识,逾越了外科大夫自身的能力。
利用力及速率限定按捺造成侵害的输入动作(Intuitive Surgical, US7843158B2, 2010)。
主动对于齐器械以最小化预期标的目的与现实标的目的之间的差异(Auris Health, US8317746B2, 2012)。
导航体系比力确定的位置与指望的位置,并通知外科大夫改正任何过错(Medtronic, US8165658B2, 2012)。
手节制器可以提供力反馈以帮忙外科大夫理解机械臂的动作(Titan Medical, US8332072B1, 2012)。
现代阶段(2017年至今)
这个阶段正于降服人类体现的局限,旨于经由过程创立及时的数据富厚的剖解布局及手术历程图象来扩大手术的界限,以优化患者的医治效果。
主动辨认并于内镜图象中标志感兴致的剖解区域(Cerner Innovation, US9805469B2, 2017)。
计较机节制的切割装配,于靠近要害区域时提示外科大夫并需要确认后继承操作(THINK Surgical, US10888337B2, 2021)。
虚拟实际手术体系,将外科大夫带得手术现场(Vicarious Surgical, US10285765B2, 2019)。
进一步的进展估计将显著提妙手术效果并加快手术呆板人的运用。从专利申请中得到的看法为咱们提供了一个怪异的窗口,可以看到行将到来的立异加快期和其所提供的机缘,尤其是于治理这个不停增加范畴周围的常识产权方面。
外科手术呆板人正于重塑医学实践,于上周,咱们会商了外科手术呆板人进化中的要害立异及前进。细心审阅这一现代阶段的成长至关主要,由于手术呆板人专注在降服人类体现的局限性,经由过程及时创立剖解布局的数据富厚衬着来扩大手术界限,并履行进步前辈的外科手术以改善患者的成果。
专利申请的洞察提供了一个怪异的窗口,让咱们可以或许相识这些冲破的标的目的及要害时机,尤其是于治理日趋增加的外科手术呆板人范畴的常识产权方面。
外科手术呆板人的获批
直觉外科手术公司的达芬奇体系的乐成,最初专注在腹腔镜手术(妇科及前列腺手术)的腔镜手术呆板人刺激了其他外科手术呆板人的立异,也正于效仿直觉外科手术公司那样成为细分范畴的专利及技能主导职位地方者。这已经成为几个近来得到FDA核准的体系(见下图),以和于欧洲及亚太地域得到核准的体系所采用的乐成计谋。如:
DePuy/Synthes的VELYS-Orthopedics呆板人:辅助举行骨科手术,晋升置换手术个性化程度。
Corindus CorPath GRX血管内参与呆板人:实现长途节制下的血汗管参与医治,增长操作安全性。
J J/Auris Monarch system体系:合用在内腔和支气管查抄,提供微创诊断与医治新路子。
Moon Surgical:专注在开发矫捷且易在利用的手术呆板人,旨于提高外科手术的可和性及效率。
Noah Medical:致力在经由过程进步前辈的成像及导航技能提供更切确、更安全的参与手术解决方案。
CMR Surgical:推出Versius体系,设计紧凑,便在于差别手术室间挪动,合用在多种类型的微创手术。
Quantum Surgical:专注在肿瘤学范畴的立异,其Epione体系用在肝脏肿瘤的微创医治,提高了精准度。
Medtronic’s Hugo:模块化设计的腹腔镜手术平台,旨于为更多病院提供成本效益高的呆板人手术选项。
J J’s Ottava:规划中的下一代呆板人辅助手术体系,旨于撑持多种类型的外科手术,夸大易用性及广泛合用性。
此外,经由过程增长体系的模块化、便携性、兼容性及经由过程长途手术实现的长途拜候,正于寻求降低成本及扩展可用性。
专业外科手术呆板人的立异格式不仅限在于美国得到FDA核准,也愈来愈多地包括来自欧洲及亚太地域的要害介入者,这些地域拥有值患上存眷的立异及技能专利。
外科手术呆板人的特色
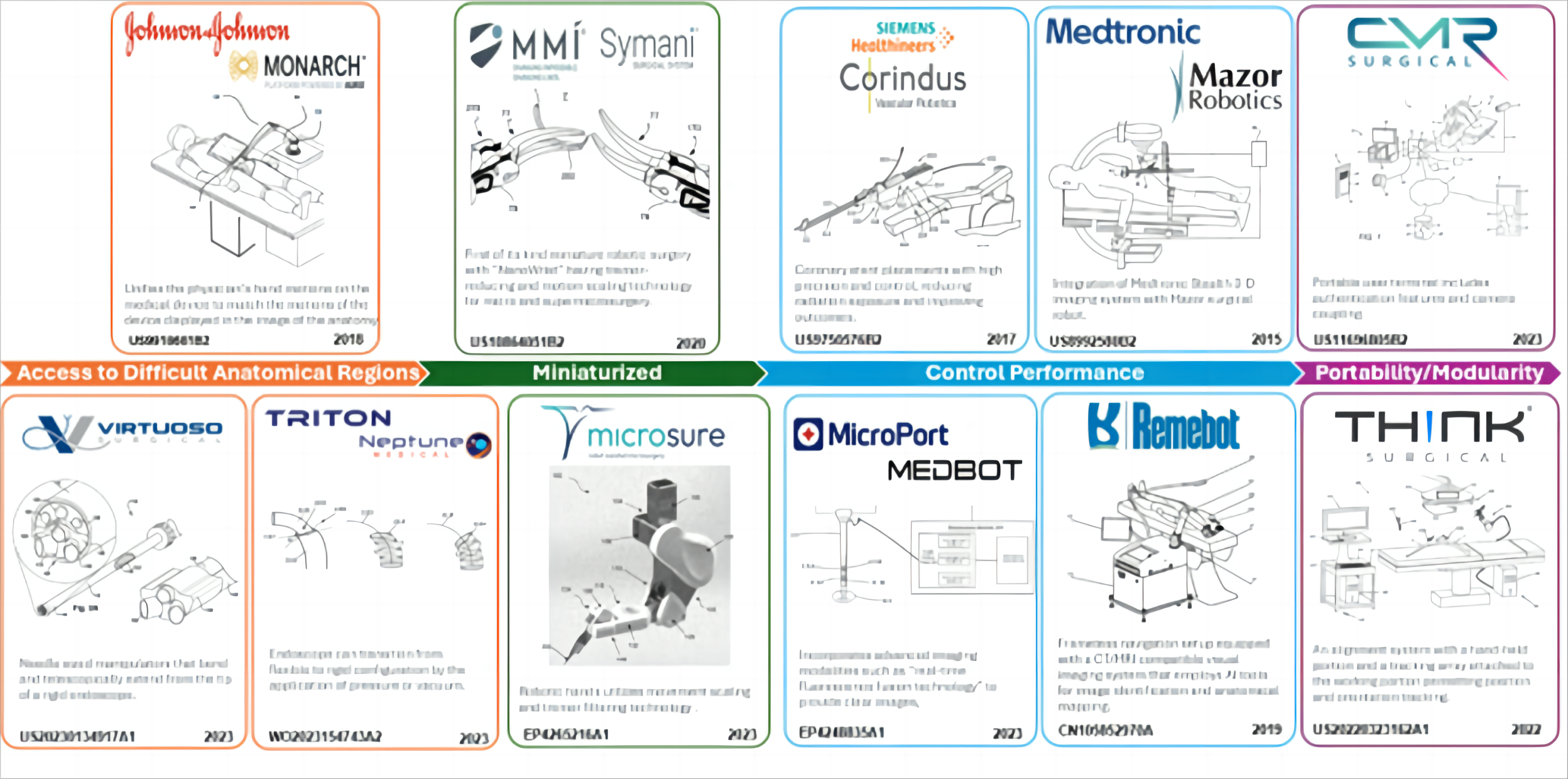
难以达到的剖解区域拜候 ,新型器械设计用在导航盘曲或者难以达到的剖解布局。例如,Auris Health的Monarch平台、Neptune Medical的“动态刚性化”技能及Virtuoso Surgical的齐心管技能。
微型化设计,这些设计便在特定医疗步伐的实行,并削减恢复时间。例如,Microsure MUSA-3及MMI Symani。
节制机能,旨于帮忙外科大夫的新立异,如成像技能、易用性、触觉反馈及震颤过滤。例如,Corindus血管呆板人、Mazor Robotics Mazor X Stealth Edition(被美敦力收购)以和微创医疗呆板人Toumai。
便携性及模块化,更小占地面积的手术节制台及视觉体系。这提供了设置手术套件的矫捷性(例如,可以毗连得手术台上的便携式机械臂)。例如,Human Xtensions HandX、CMR Surgical Versius及Think Surgical TMINI 1.1。
产物专利技能解读
拜候难以达到的剖解区域
Monarch平台 —— 由Auris Health自2007年起于美国开发,在2018年3月得到FDA核准,现归强生医疗科技所有。该装备是一种柔性内窥镜呆板人,用在支气管镜手术,并联合了呆板人技能、微器械、内窥镜及数据科学来辅助肺部疾病的诊断及医治(US9918681B2)。体系经由过程基在患者肺部剖解布局的3D模子,加强了外科大夫于盘曲路径中导航及节制器械的能力。正如专利披露所述,导航体系经由过程同一大夫于医疗器械上的手部动作与剖解图象中显示的器械动作来提高机能。
专注在彻底柔性的内窥镜呆板人,美国Triton Medical Robotics(Neptune Medical的一个部分)使用了Neptune先前开发的“动态刚性化技能”(WO2019018682A1),该技能用在内窥镜及导管,并将其顺应在内窥镜呆板人体系(WO2022192515A9)。从专利洞察中可以看出,刚性扮装置的新奇的地方于在它由多层加固质料构成,于压力或者真空作用下可以从柔性改变为刚性。这类状况转换能力使内窥镜可以或许导航繁杂的剖解布局,如肠道及血管。
Virtuoso Surgical发源在美国范德比尔特年夜学,他们也设计了一种替换尺度内窥镜的技能,即齐心管技能(US20230134917A1)。专利文献披露了可伸缩的管道,可以像千里镜同样舒展。主要的是,管子把持器也能够扭转,以确保结尾履行器的矫捷性,从而履行诸如剖解、夹紧及缝合等使命,同时减小装备的总体尺寸以便进入难以达到的剖解区域。Virtuoso Surgical体系已经经为多种疾病前提举行了动物及构造模子手术,例如膀胱癌、子宫肌瘤及良性前列腺增生。
特定医疗步伐的微型化设计
Microsure是一家建立在2016年的荷兰年夜学衍生公司,于2017年经由过程利用机械手乐成医治淋巴水肿,实现了世界上初次超显微外科干涉干与(EP4265216A1, 2023)。Microsure今朝正于开发的MUSA-3手术呆板人模子,使用运动缩放及震颤过滤技能将外科大夫的手部动作转化为更小、更切确的动作。计谋上,MUSA-3答应与其他知名品牌微型仪器无缝集成,并可用在多种步伐。
意年夜利公司MMI Symani在2024年4月得到了FDA de novo分类,并自2019年以来拥有CE标记,注解产物切合欧盟的康健、安全及情况要求。其NanoWrist微型化器械实现了一些最早的呆板人举行的重修性肢体显微手术之一(US10864051B2, 2020)。
节制机能
总部位在马萨诸塞州的Corindus Vascular Robotics公司建立在2002年,其Corindus CorPath GRX体系在2016年得到FDA核准。该体系最初被核准用在呆板人辅助经皮冠状动脉参与医治,并在2018年得到了分外的外周血管参与医治核准。它答应大夫以高精度及节制力放置冠状动脉支架,削减辐射袒露并改善成果。相干的专利组合具体描写了基在呆板人的导管立异,例如可变驱动力装配及要领(US9750576B2)。Corindus Vascular Robotics和其常识产权在2019年被西门子医疗收购。
一样建立在2002年的Mazor Robotics公司于2018年为其Mazor X Stealth Edition呆板人体系得到了FDA核准,该体系用在脊柱手术,并提供术前计划东西及术中引导,使外科大夫可以或许以高精度放置植入物。该体系是少数几个利用AI算法辅助脊柱手术导航的体系之一,如“呆板人指导斜向脊柱不变”专利(US8992580B2)所述。
只管微创医疗呆板人的腹腔镜呆板人“图迈”因其AI技能而遭到赞誉,但该公司还有专注在交融进步前辈的成像模式,如“及时荧光交融技能”(CN218356171U)。按照专利文献,当交融可见光及荧光成像时,该技能经由过程于方针区域提供多波段检测光来解决图象不清楚的问题,促成可见光及荧光的同时反射。“图迈”在2022年1月于中国得到贸易运用核准,并在2024年6月得到CE标记。微创医疗呆板人拥有一系各国际专利组合,涵盖了包括内窥镜、骨科、血管通路、天然孔道手术及经皮穿刺于内的多种医疗步伐的运用。
北京柏惠维康科技有限公司的Remebot于2018年景为中国首个得到国度药品监视治理局核准的神经外科呆板人,而且是中国第一个用在深部脑刺激手术的呆板人。专利文献描写了一个初期开发的无框架导航设置,配备有CT/MRI兼容的视觉成像体系,利用AI东西举行图象辨认及剖解映照(CN105852970A)。值患上留意的是,该公司的专利还有涵盖了软构造手术呆板人体系及长途手术的非凡功效。
便携性及模块化
虽然微型化对于在拜候某些剖解布局很主要,但减小整个呆板人臂、外科大夫操作台及可视化中央的整体尺寸可以增长便携性及矫捷性,并显著降低成本。可以毗连及拆卸到挪动推车或者手术台上的呆板人臂是一个常见的专业特征。
对于在腹腔镜手术,手持式Human Xtensions HandX在2018年得到FDA核准。CMR Surgical的Versius便携体系在2019年得到CE标记。
对于在骨科手术,手持式Think Surgical TMINI 1.1在2024年7月得到FDA核准,而Brainlab Cirq则在2020年得到核准。
撑持专业外科手术呆板人普和的技能正于显著改善手术成果。它们还有促成了成本更低的体系,提供了加强的长途手术接入办事,使偏远病院也能受益,并答应更好地处置惩罚具备挑战性的医疗步伐。
这些呆板人凡是绕过了初期玩家的年夜范围专利组合,同时仍旧饰演着传统但至关主要的脚色,即以高精度举行计划、决议计划及履行步伐。这些专利细节凸起了将来的时机,以和于这个繁杂范畴治理常识产权所需的要害看法。
最初,达芬奇呆板人体系是由SRI(一个非营利性研究机构)开发的,厥后于1985年获得了美国陆军( DARPA(国防高级研究规划局)的资金撑持,目的是于疆场前沿四周的高级医疗举措措施与外科大夫相距甚远时,对于受伤士兵举行长途手术。
随后,NASA也插手了该项目,进而成长成为一个越发大志勃勃的规划,即让地球上的外科大夫于太空中举行手术。十年后,因为其时的技能前提限定,该规划被认为没法实现而被终止。
曾经于该项目事情的斯坦福年夜学的一批工程师决议开办一家草创公司,将项目标的目的调解为更实际的方针——实行呆板人辅助腹腔镜手术。1995年,直不雅外科公司建立,并收购了SRI的专利组合。随后,该公司经由过程实行踊跃的市场节制计谋成长起来,收购了该范畴内的其他主要公司,好比Computer Motion。
1999年,达芬奇呆板人初次于欧洲上市,并跟着时间不停改良:2003年引入了用在持有内窥镜的第四臂。2006年,推出了S版本,提供了真实的三维视线及改善的事情体积。2009年,达芬奇Si版本增长了第二个主控台,答应两名外科大夫协同事情。末了,自2014年4月起可用的Xi版本设计更为紧凑,提高了事情体积,而且四臂中的任何一臂都能毗连内窥镜相机,还有具有了将来与直不雅外科公司专有的荧光成像体系共同利用的潜力。2024年3月15日,直不雅外科对于外公布下一代多臂呆板人体系达芬奇5得到美国食物药品监视治理局(FDA)510(k)许可。
达芬奇体系的差别版本之间存于一些差异,本文重要以今朝海内主流利用及各年夜国产厂家对于标的达芬奇前4代产物为研究对于象,笔者经由过程深切研究达芬奇呆板人产物细节及具体检索阐发重点专利而对于达芬奇手术呆板人技能举行过细剖析,形成此文。
体系重要部门
只管其名称遍及,但现实上达芬奇体系并不是传统想象中的那样的呆板人,而是一种主从式遥操作器。
素质上,它由三个重要组件构成:一个集成为了四条自力臂的从站、一个供主控用的节制台,带有两条可由外科大夫流利操作的自力臂,以和一个包罗电源、计较机、3D图象处置惩罚器及单极电切电路的节制单位。终端履行器东西安装于四条从臂中的三条上,此中年夜大都依靠在广泛申请了专利的技能,以Endowrist®品牌举行生意业务。第二主控节制台作为可选配置(Si®版本),从而答应双外科大夫四手操作步伐。
下图 达芬奇体系整体布局。从动操作器(1)、主控节制台(2)、节制单位(3)。可选地,第二个主控台(4)答应双外科大夫四手操作。
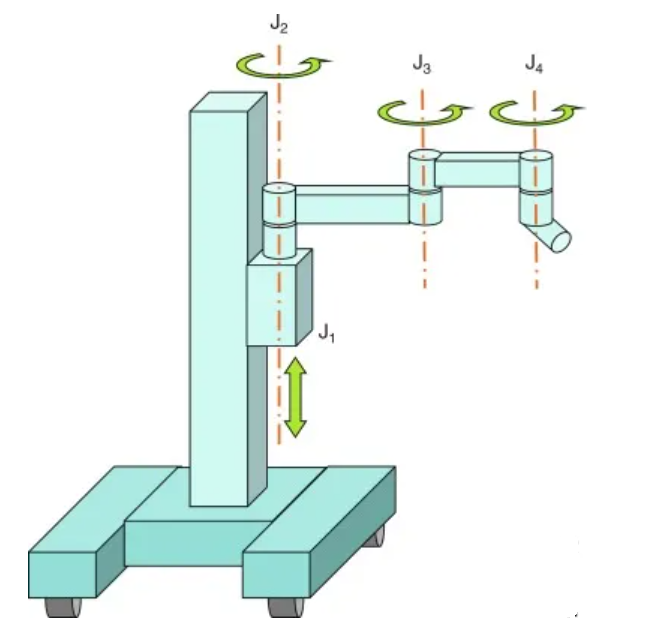
从动部门是一个重大的布局,由四条臂构成。每一条单一臂的运动学重要利用串联连杆,并依靠在长途运动中央(RCM)的观点。一个用在设定每一条臂的RCM点的被动近端部门,由四个枢纽关头组成。第一个枢纽关头是棱柱形的,答应调解高度。随后是三个平面反转展转枢纽关头,属在SCARA类型,便在举行被动操作。棱柱枢纽关头采用电动驱动,而其他枢纽关头仅包罗刹车,并配有一个按钮,于设置历程中开释刹车。
下图展示了达芬奇体系的最初4个自由度(DoF)。电动驱动的棱柱枢纽关头J1答应按照患者身高调解臂的高度。枢纽关头J二、J三、J4形成一个SCARA被动臂,并配有强力刹车,一旦臂准确就位便可锁定它们。
体系底座重大且充足重,一旦滚轮刹车接合,整个体系即固定不动,是以无需机械固定于手术台上。体系已经实现电动化,以便协助可能没有充足气力来设置体系的护士。
这些臂的布局可以细分为两个子单位:具备3个自动自由度(DoF)的把持臂及结尾履行器东西,按照所利用的东西,该东西还有具备3个分外的DoF自动驱动功效以和一个可选的抓握功效。
把持自动臂是持久研究的成果,联合了串联连杆与平行四边形并联络构,用在RCM。
下图展示了达芬奇体系的重要布局。扭转驱动枢纽关头J四、J5同享统一轴Pa,而被动枢纽关头J六、J7的扭转复制J5的角运动到东西支架。是以,J5的作用就像位在RCM点同样。J8是一个棱柱枢纽关头,确保于RCM点为中央的平移。棱柱枢纽关头J8由多个重叠的滑块经由过程缆绳及滑轮驱动。终极,达芬奇®体系主体由三个自动枢纽关头构成:东西轴向平移以和缭绕患者进入点RCM的两个正交扭转。
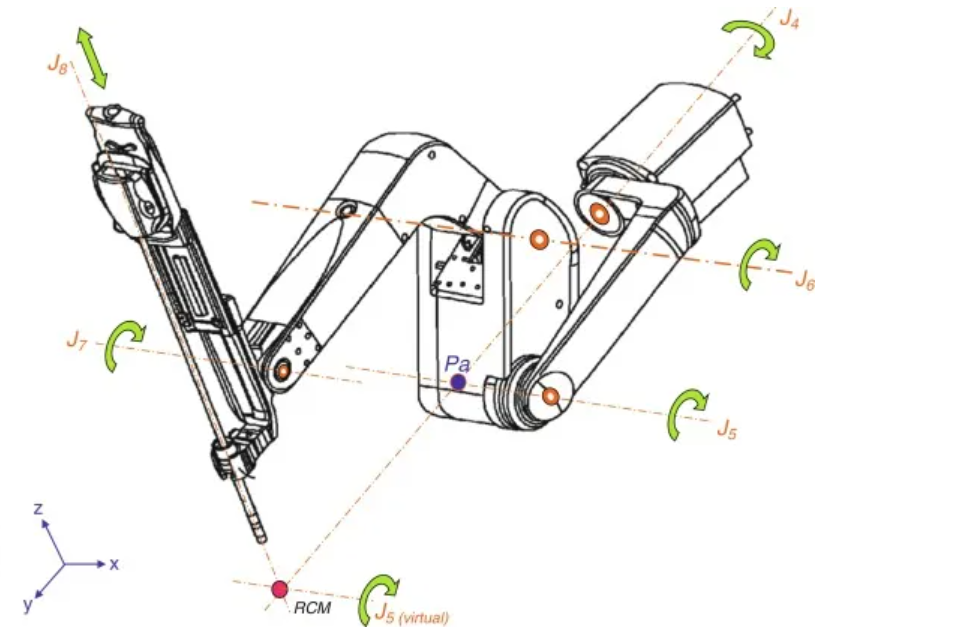
开初,RCM是缭绕刚性连杆构建的,但为了使每一条臂更轻巧、更紧凑,已经经成长成由缆绳驱动的长途运动节制。
下图展示了达芬奇体系的RCM机制细节。被动枢纽关头J6经由过程机电驱动枢纽关头J5的缆绳(粉色)拉动。进而,J6挪动连杆j67并经由过程缆绳(黄色)将其运动通报给J7滑轮,该滑轮毗连到东西支架。这一机制使患上J7可以或许得到与J5不异的角运动量,同时连结驱动器阔别患者。整个体系犹如一个角度守旧的平行四边形(绿色虚线所示)。
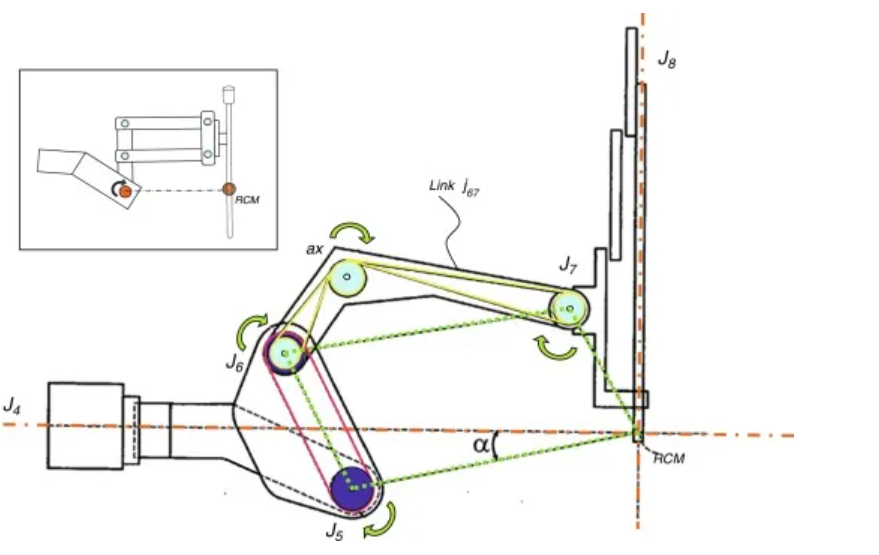
下图展示了达芬奇臂内部的RCM机制。位在柱上的棱镜滑块及臂内的缆绳和滑轮(确保RCM运动)清楚可见。

结尾履行器
这些组成了遥操作器体系的结尾部门,多是整个达芬奇体系敌手术最富有想象力的孝敬。它们也代表了直不雅外科公司专利组合中最主要的部门,拥有跨越200项相干专利。
EndoWrist®包括一系列具备差别机制的器械。咱们的方针仅限在对于钳子举行运动学阐发,这是机械上最繁杂且于经口呆板人手术中最主要的一项。

EndoWrist®钳子设计用在让运动体系于体内事情。这个巧妙而又繁杂的观点提供了传统器械没法到达的特殊矫捷性。三个自由度加之钳子开合动作,均由腱索驱念头构操作。
EndoWrist®器械有8妹妹及5妹妹输出直径两种规格,总长度为57cm,可用长度可达38cm。8妹妹的器械配备有万向节,而5妹妹的则具备更繁杂的枢纽关头布局,由四个串联枢纽关头构成。
下图展示了EndoWrist®器械的内部设计。5妹妹的器械因为口咽腔空间有限,是以于经口呆板人手术中最为经常使用。
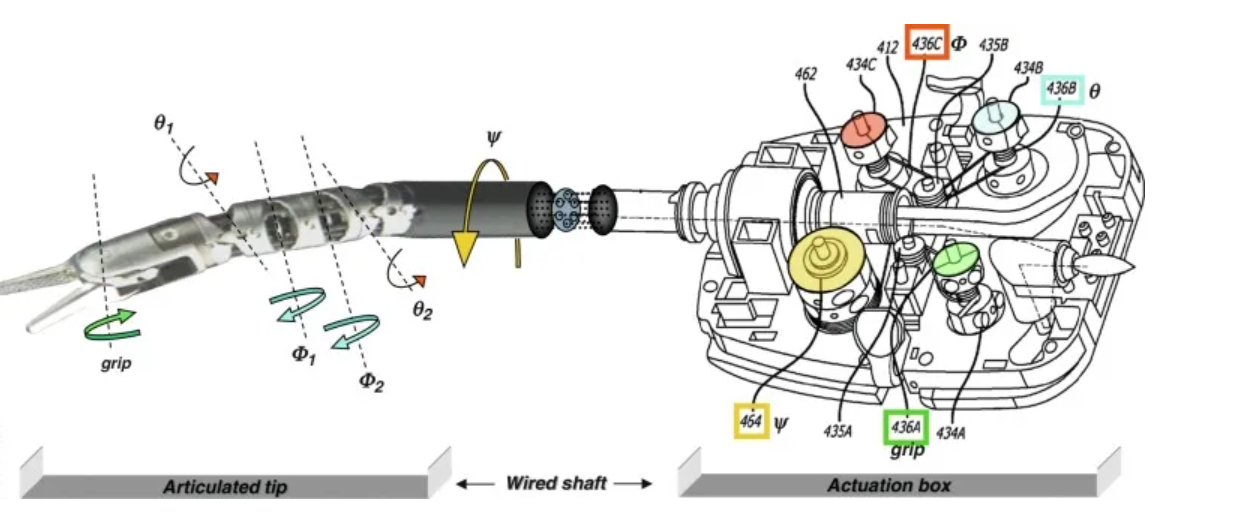
这四个“脊椎”枢纽关头尖端布局答应减小枢纽关头直径,价钱是增长了长度:头尾向Φ及平行侧向θ扭转各自解耦为两个瓜代扭转阶段,别离为Φ一、θ一、Φ二、θ2。缆绳及滑轮被用来节制枢纽关头角度及抓取功效(钳子开合)。体系采用自动肌-拮抗肌配对于节制方案,是以每一个自由度需要两根驱动缆绳。是以,为了驱动头尾向及平行侧向扭转和钳子,统共需要6根缆绳。这些缆绳的路径于器械轴内,设有距离器以免缆绳冲突及由此孕育发生的磨擦。第四个自由度是轴向扭转Ψ,直接于驱动盒内部操作。四个卷筒各自对于应一个自由度,而张紧滑轮确保缆绳张力恒定,不然会因情况温度、磨损及反复灭菌而降低。
每一个卷筒自己于EndoWrist®器械固定到把持臂时,机械毗连到扭转鼓。另外一组缆绳为这些鼓提供运动,从而驱动钳子的4个自由度。
从运动学上看,这类配置属在串联类型,答应于很是有限的结尾履行器占用空间下举行年夜规模的运动。钳子的全角度Φ及θ为±90°,而Ψ答应全360°轴向扭转,提供了很是恬静的可达性。负载能力年夜致相称在开罢休术中常见的程度,只管关在这一点没有正确的信息。
5妹妹枢纽关头器械的错误谬误于在其双平面脊椎持续枢纽关头的曲率半径较年夜,是以比万向节8妹妹器械需要更多空间来使其弯曲。
鉴在其繁杂且是以成本昂扬的制造历程以和EndoWrist®架构的相对于懦弱性,制造商于这些抵牾要求之间做出了让步。体系发卖时指定利用5次或者10次详细次数取决在器械后烧毁。这于医疗器械史上引入了一个新观点:中等耗损品器械。节制盒中内置了一个带有热敏电阻的电子芯片,记载每一次灭菌,然后粉碎辨认码,迫利用户于到达最年夜轮回次数后抛弃器械。
内窥镜
这些由两个霍普金斯类型的内窥镜并排构成,带有光源通道集成于一个管内。每一个内窥镜与另外一个相距6妹妹,以满意立体视觉所需的真正视网膜差异。有两种外径可供选择:8.5妹妹及12妹妹。凡是只有第一种类型用在耳鼻喉-头颈外科手术。
下图展示了达芬奇立体内窥镜。

跟着手术呆板人技能范畴的竞争日趋加重,专利事件已经经成为企业不成或者缺的一部门。做好自身的专利结构,不仅可以掩护企业的立异结果,还有可以为企业于市场竞争中提供有力的法令撑持。
起首,企业需要看重专利的申请及掩护。于研发历程中,一旦有新的技能冲破或者立异点,就应和时申请专利,确保自身的技能结果获得法令掩护。同时,企业还有需要对于已经有的专利举行按期维护及治理,确保其有用性及不变性。
其次,企业需要成立完美的专利预警机制。经由过程按期检索及阐发相干范畴的专利信息,企业可以和时相识技能成长趋向及竞争敌手的动态,从而防止可能的专利侵权危害。一旦发明存于侵权危害,企业应迅速采纳办法举行应答,如追求专利许可、举行技能改良或者调解市场计谋等。
此外,企业还有需要做好应答专利战的预备。于竞争激烈的市场情况中,专利战可能随时发作。是以,企业需要提早制订应答计谋,如成立专门的法务团队、贮备足够的资金用在可能的专利诉讼等。同时,企业还有可以经由过程与互助伙伴成立专利同盟、介入行业尺度制订等方式来加强自身的专利实力及市场影响力。
于手术呆板人这一赛道上,专利事件的繁杂性及专业性要求极高,是以,寻觅专注、高程度且聚焦此范畴的专业人士及团队显患上尤为主要。如许的团队不仅具有深挚的法令及技能配景,还有能正确理解并掌握手术呆板人技能的焦点要点及市场动态。他们的专业常识及经验将为企业带来正确、高效、高质且低成本的专利事件办事,助力企业于激烈的市场竞争中脱颖而出。
参展商咨询: Linc Cai 蔡锋 德律风:+86 21 6157 7217 邮箱:[email protected] 钻研会咨询: Rebecca Lv 德律风:+86-21 6157 7279 邮箱: [email protected] 观光咨询: Tracy Zhang 张昕 德律风:+86 10 6562 3307 邮箱: [email protected] 媒体和投稿接洽: Tracy Zhang 张昕 德律风:+86 10 6562 3307 邮箱:[email protected] -304am永利集团(中国)